高旋
活着,热爱,创造
上海大学 | 本科自动化 | 研究生仪器科学与技术(保研)
gaoxuan@shu.edu.cn
教育背景
上海大学 | 仪器科学与技术(硕士研究生,保研)
在读 | 排名:1/25
研究方向:机器人视觉、深度学习、智能感知
上海大学 | 自动化(本科)
已毕业 | 排名:23/151
专业方向:自动化控制
学术论文
A Dual-Sampling and Interpolation Approach for Tomato Cluster Stem Pose Analysis in Sparse Point Cloud Data
7th International Conference on Electronic Engineering and Informatics (EEI) | 2025
作者:Xuan Gao (1), Zifei Zhou, Haofei Zuo, Teng Sun*
一种双采样与插值方法,用于稀疏点云数据中番茄簇茎秆姿态分析
Computers and Electronics in Agriculture (IF=7.7) | 2024
作者:Teng Sun, Wei Zhang, Xuan Gao, Wen Zhang, Nan Li, Zhonghua Miao
基于主动深度感知的高效遮挡避免方法,应用于农业收割机器人
竞赛经历
RoboMaster 机甲大师高校系列赛
全国大学生机器人大赛
负责视觉处理与预测算法
- 视觉处理:在NVIDIA NX及GX开发板下,标定矫正海康工业摄像机。使用OpenCV进行图像预处理(灰度转换、高斯平滑、直方图均衡化)。利用YoloV5进行装甲板物体检测,通过坐标系转换获取距离与位置信息
- 卡尔曼滤波:实现弹道预测算法,结合射速与重力加速度进行目标状态预测,有效处理观测噪声,适用于实时系统
项目展示
RoboCom 四足机器人物资运送比赛
智能感知与运动控制
负责运动控制、通信与视觉处理
- 运动控制:在Linux环境下,基于SDK使用C++进行运动路线、机器狗状态编程,分阶段控制机器人运动
- 通信:通过UDP实现视觉板与运动板之间通讯的实时数据交换
- 视觉处理:利用ARM开发板和Intel D435深度摄像头进行图像识别,处理反光环境及道路、障碍物轮廓检测
项目展示

"兆易创新杯"第十九届中国研究生电子设计竞赛
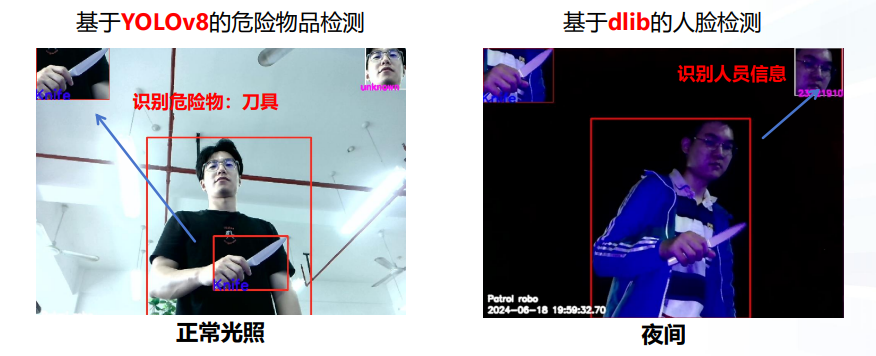
人工智能类 | 智慧校园巡检机器人
- 视觉识别:基于深度学习和计算机视觉技术,实时分析摄像头图像,多任务并行处理人脸识别和危险物品识别,生成预警信息
- 多模态交互:结合语音交互与大模型,使机器人能够理解自然语言指令,接收任务、报告巡检状态和进展
项目展示


项目经验
LLM驱动的具身智能机器人控制系统
上海高翌 × 宇树科技
构建基于大语言模型(LLM)的具身智能机器人交互与控制系统,实现从自然语言指令 → 任务规划 → 机器人执行的端到端闭环。系统支持语音、视觉与机器人控制的多模态协同,通过 Agent 任务规划 + ROS2 控制框架驱动双臂人形机器人完成抓取、移动、倒水等复杂操作。
核心工作:
- 大语言模型智能体构建:基于 LangChain / LangGraph 构建大语言模型智能体,通过工具调用机制,实现对自然语言指令的理解、任务分解与动态调度,设计全局状态管理与对话记忆机制,实现任务执行中的上下文保持与历史信息摘要
- ROS2 机器人控制流程:基于 ROS2 搭建机器人控制流程,实现对双臂人形机器人(包括机械臂、夹爪、躯干及移动底盘)的协同控制与任务执行
- 多模态交互系统:集成语音识别(ASR)、语音合成(TTS)与视觉感知模块,构建语音指令驱动的多模态交互系统
- 视觉引导抓取:实现目标物体的视觉定位与坐标系转换,支持基于视觉引导的机器人抓取操作,完成机械臂姿态解算与逆运动学求解,支撑机器人双臂执行动作
- 多线程并发管理:采用多线程架构对 LLM 推理、语音处理与机器人控制任务进行并发管理,提升系统实时性与运行效率
面向采摘机器人的高鲁棒目标识别与定位技术
上海农科院 | 自主研发
自主研发适用于大棚农业环境的智能采摘机器人系统,基于JAKA协作机械臂与D405深度相机,实现对串番茄的高精度识别与自动采摘。系统已完成在上海孙桥溢佳农业基地与崇明光明农场的多轮实地测试,具备较强的环境适应性与实际作业能力。
主要工作:负责机械臂控制程序开发与目标识别算法
- 机械臂控制算法开发:负责JAKA机械臂的运动控制程序设计,基于机械臂DH模型自主实现机械臂的正/逆运动学解算与轨迹规划,提升末端执行器在复杂姿态下的精准性与稳定性
- 视觉识别系统设计与部署:主导系统级视觉方案设计,融合深度神经网络模型(YOLO)与深度图信息,实现串番茄果实的精准定位、姿态估计以及枝叶遮挡处理。支持对茎秆直径小于5mm目标的鲁棒识别
- 视点优化与任务策略制定:研究并应用视点选择算法,根据遮挡程度与识别置信度动态规划相机位置,提高单次感知效率并降低机械臂无效动作频率
- 现场部署与调试:负责系统软硬件集成、视觉与控制模块联调,参与实地测试任务,完成多个不同自然光照和枝叶形态条件下的采摘任务验证
项目展示
获奖经历



专业技能
编程语言
C++, Python, JavaScript, HTML/CSS
计算机视觉
OpenCV, YoloV5, 图像处理, 标定与矫正
深度学习
目标检测, 多任务学习, 大模型应用
开发平台
NVIDIA NX/GX, ARM开发板, Linux
硬件设备
海康工业相机, Intel D435深度相机, JAKA协作机械臂
算法与理论
卡尔曼滤波, 坐标系转换, UDP通信, 正逆运动学, 轨迹规划